Menu
Close
Introduction
Research
Team
Publication
Project
NEWS
Gallery
Contact us
Introduction
Research
Team
Publication
Project
NEWS
Gallery
Contact us
NEWS
2024 Spring Semester gathering
April 22, 2024
Gallery
Read More
TU Berlin – KAIST Seminar
April 22, 2024
NEWS
Read More
NRF AWARD
April 1, 2024
NEWS
Read More
Hyuncheol Park Award
February 2, 2024
NEWS
Read More
KAIST 원격제어기술 협력 MOU체결
January 25, 2024
NEWS
Read More
TUPA in TRB2024
January 18, 2024
Gallery
Read More
UAE UAS Visits
January 9, 2024
Gallery
Read More
Startup Idea Contest
December 15, 2023
NEWS
Read More
Year End Eve Party
December 12, 2023
Gallery
Read More
Deep Mobility Consortium
December 4, 2023
NEWS
Read More
KAIST Q-Day Faculty Special Awards
November 28, 2023
NEWS
Read More
Tupa Fall Picnic
November 3, 2023
Gallery
Read More
TRIPS competition award
October 19, 2023
NEWS
Read More
2023 Fall Transport conference
October 12, 2023
Gallery
Read More
Department sports event
October 6, 2023
Gallery
Read More
NEW students BBQ
August 30, 2023
Gallery
Read More
Tupa in Mud
August 9, 2023
Gallery
Read More
2023 Mobility summer camp
July 30, 2023
Gallery
Read More
2023 mobility summer camp
July 25, 2023
NEWS
Read More
Metaverse based Emerging Technology
July 4, 2023
Reasearch Project
Read More
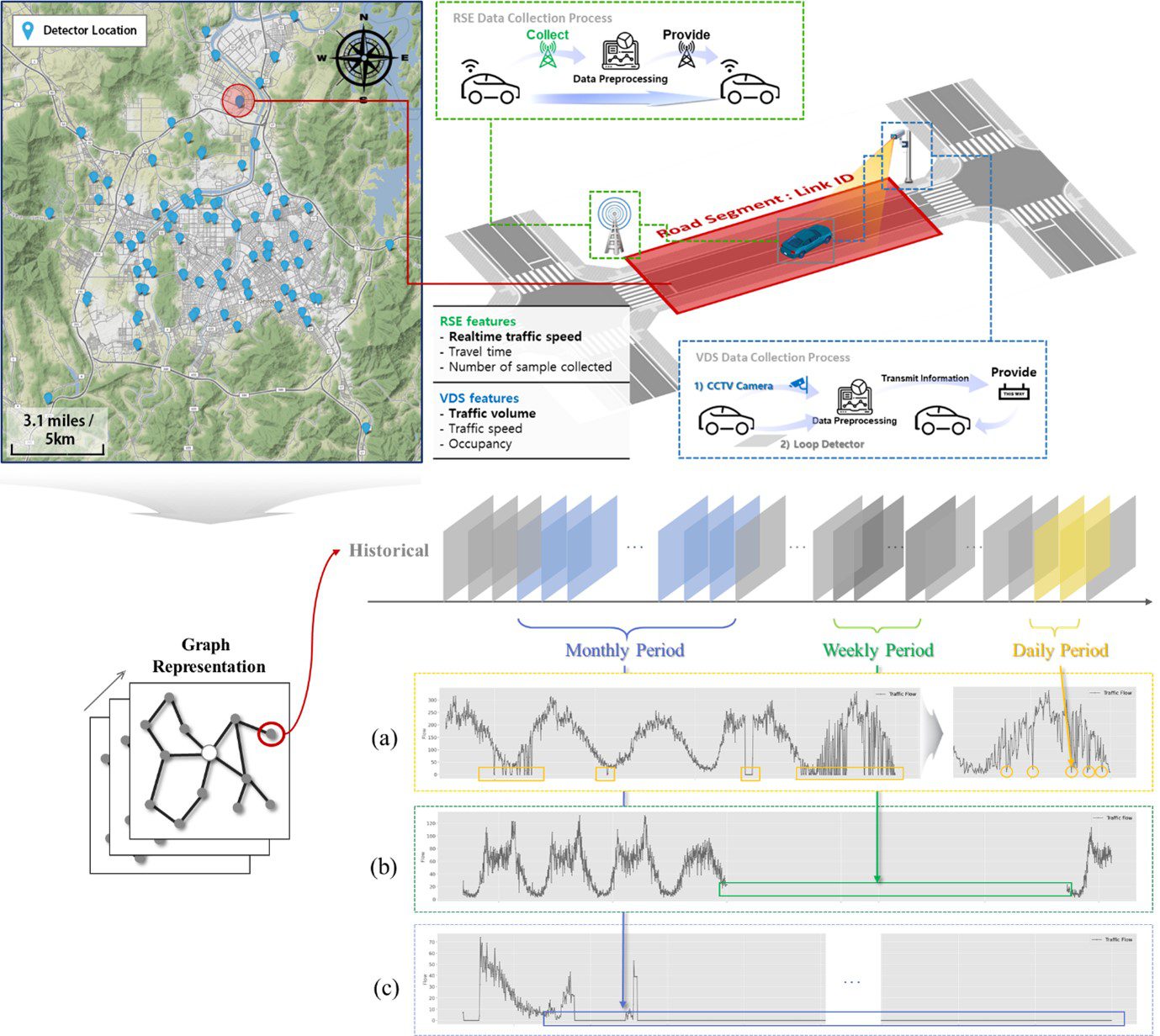
Data-driven approach for the practical transportation operation
July 3, 2023
Reasearch Project
Read More
Human factor safety
July 3, 2023
Reasearch Project
Read More
Reinforcement Learning based signal optimization
July 2, 2023
Reasearch Project
Read More
NYU President Linda in KAIST
May 29, 2023
Gallery
,
NEWS
Read More
Teacher’s day
May 18, 2023
Gallery
Read More
원희룡 국토교통부 장관 카이스트 방문
May 16, 2023
NEWS
Read More
Dr. Chunling Wu Faculty at Uni. of Western Australia
May 10, 2023
NEWS
Read More
Fatemeh joins UNSW for phd
May 10, 2023
NEWS
Read More
Lily Visits KAIST
May 1, 2023
NEWS
Read More
Best paper award
April 21, 2023
NEWS
Read More
2023 SEOUL MOBILITY SHOW
April 9, 2023
Gallery
Read More
TUPA in the Mobility Show
April 9, 2023
NEWS
Read More
Inhi joins KAIST
February 14, 2023
NEWS
Read More
Acquisition of DRONE license
November 16, 2022
NEWS
Read More
TUPA in the TRB 2023
October 8, 2022
NEWS
Read More
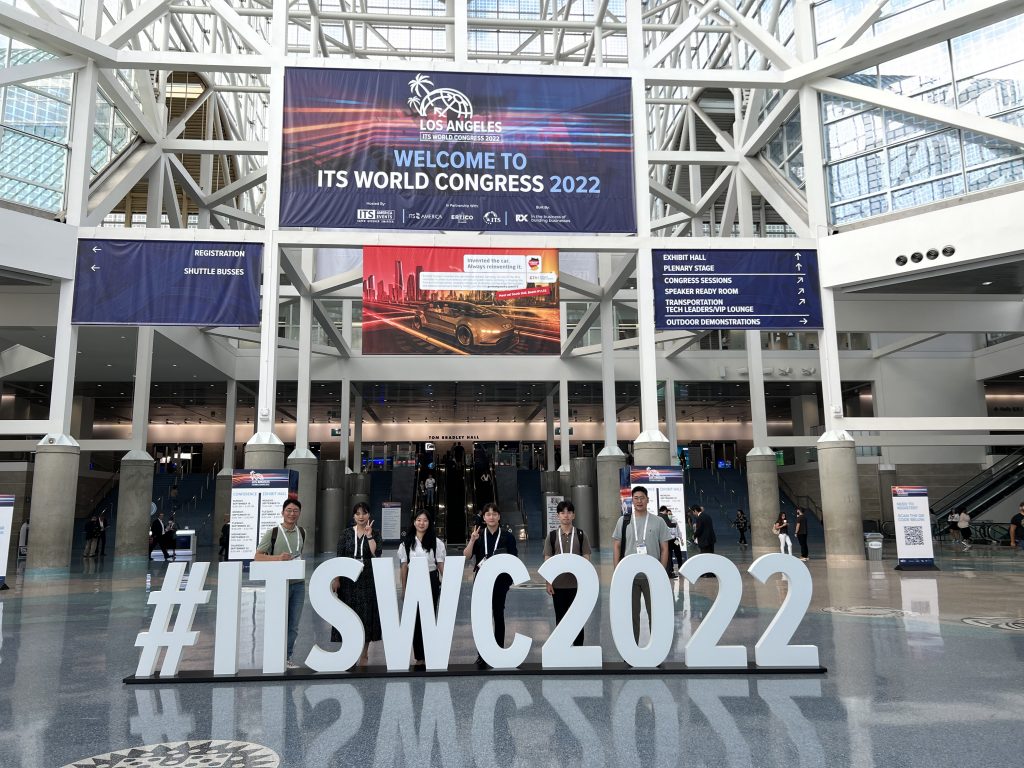
ITS World Congress 2022 in LA & LV & SC
October 5, 2022
Gallery
Read More
KST2020 &IPTF
October 4, 2022
NEWS
Read More
ITS World Congress 2022 – Los Angeles
October 4, 2022
NEWS
Read More
1ST place for KAKAO Mobility Data Competition
September 30, 2022
NEWS
Read More
BEST PAPER AWARD FROM 2022 KOREA ITS CONFERENCE
July 20, 2022
NEWS
Read More
2022 Spring ITS conference
July 1, 2022
Gallery
Read More
32회 과학기술우수논문상
July 1, 2022
NEWS
Read More
Best paper award from 2022 Korea ITS conference
June 23, 2022
NEWS
Read More
Best paper presentation
May 23, 2022
NEWS
Read More
86th Spring Transportation conference
April 25, 2022
Gallery
Read More
Best paper of the year 2021
April 21, 2022
NEWS
Read More
Tupa in the Everland
April 12, 2022
Gallery
Read More
TUPA to Qatar Worldcup!!
March 25, 2022
Gallery
Read More
TUPA in Shooting
March 24, 2022
Gallery
Read More
Tupa in Snow
February 22, 2022
Gallery
Read More
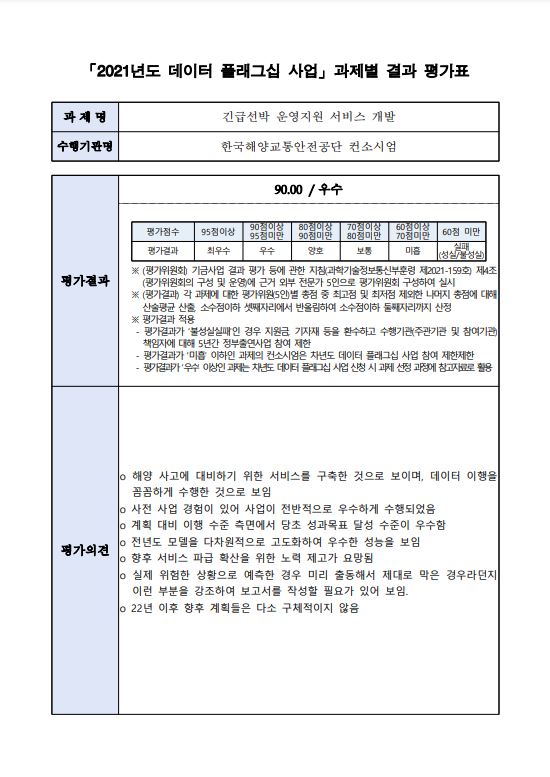
2021 데이터 플래그십 사업 “우수” 평가
February 7, 2022
NEWS
Read More
Bye Zahra
January 17, 2022
Gallery
Read More
Adios 2021
December 29, 2021
Gallery
Read More
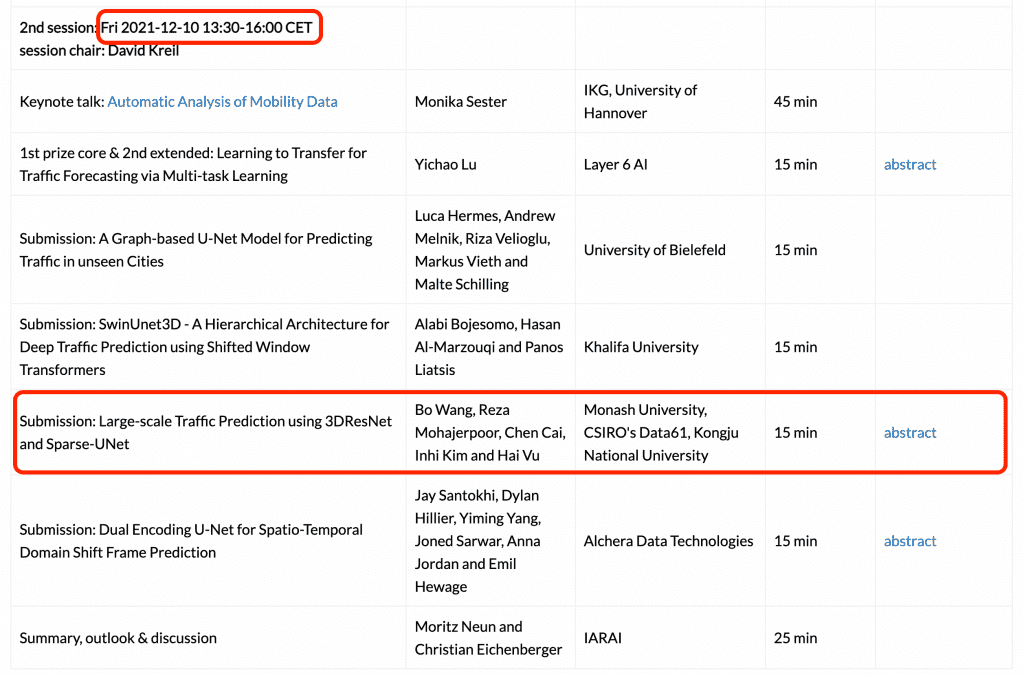
TUPA in the NeurIPS 2021
December 9, 2021
NEWS
Read More
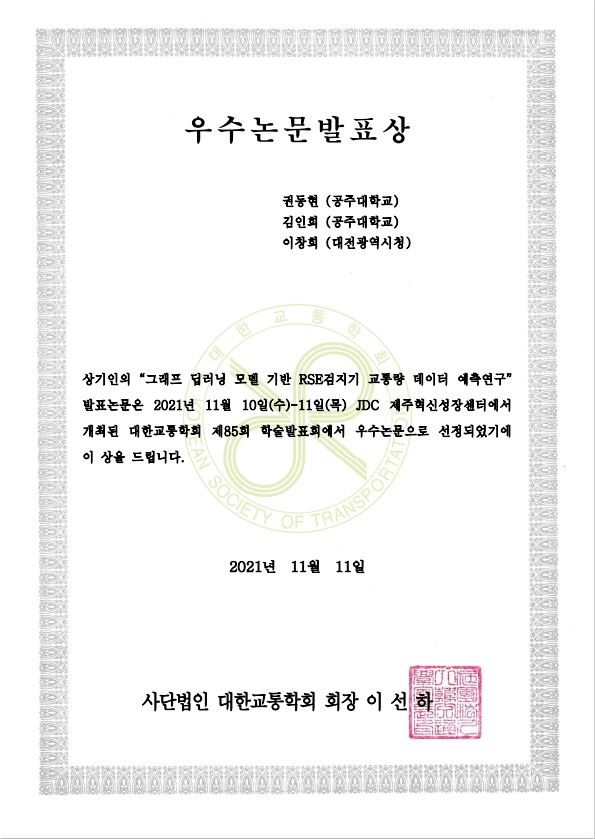
TUPA got AWARDS (2021 추계 교통학회)
December 2, 2021
NEWS
Read More
Dong Xiao Mid Candidature
November 29, 2021
NEWS
Read More
유예지 학생 박창호 장학금 수여
November 12, 2021
NEWS
Read More
85회 2021 추계 교통학술대회
November 11, 2021
NEWS
Read More
85th Fall Transportation conference
November 10, 2021
Gallery
Read More
2021년 추계 ITS 학회 우수 논문상 수상 – 4학년 박현철
November 2, 2021
NEWS
Read More
한국ITS학회 2021년도 추계학술대회
October 22, 2021
NEWS
Read More
YSC in the TUPA
October 18, 2021
NEWS
Read More
Picnic
September 15, 2021
Gallery
Read More
Bo’s PhD final submission
September 7, 2021
NEWS
Read More
2021 해양수산 빅데이터 분석 경진대회 대상/최우수상/우수상 수상
August 23, 2021
NEWS
Read More
김인희교수 2021년도 우수신진연구 최초혁신실험실 최종선정
July 20, 2021
NEWS
Read More
김인희교수 2021 기초연구실 지원사업 선정
May 26, 2021
NEWS
Read More
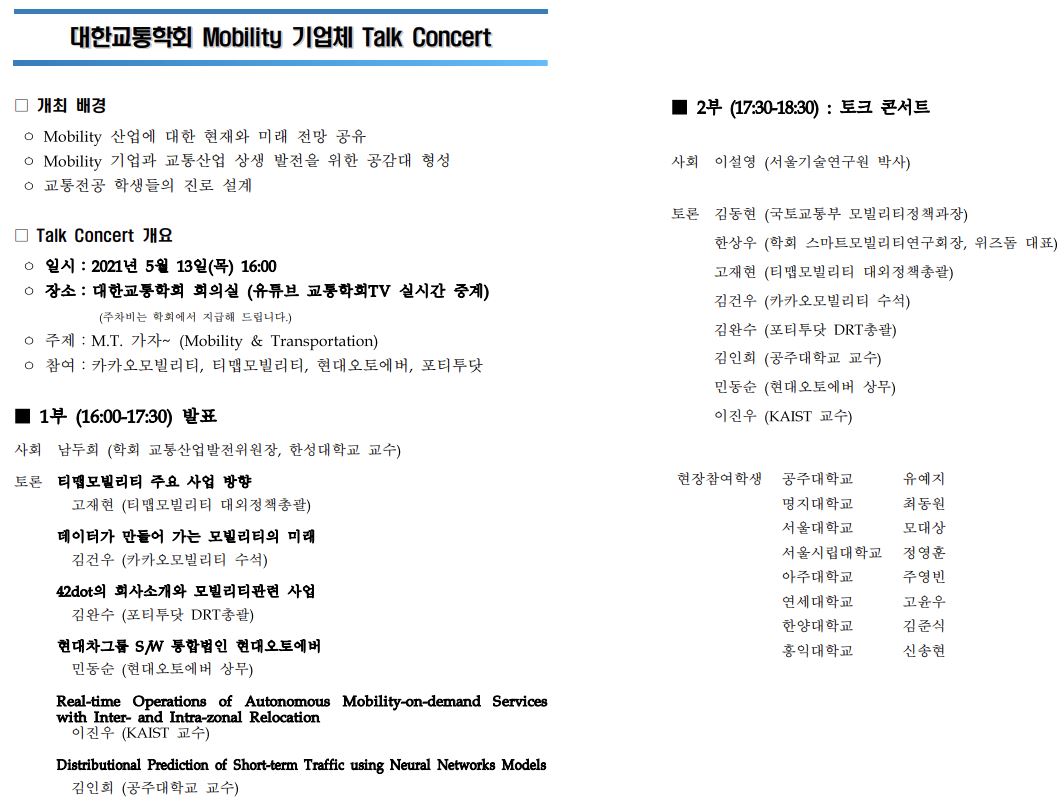
대한교통학회 Mobility Mobility 기업체 Talk Concert
May 12, 2021
NEWS
Read More
Wenhua’s pre-submission
May 10, 2021
NEWS
Read More
2021 춘계 ITS학술대회 우수논문상
May 6, 2021
NEWS
Read More
2021 춘계 ITS학회
April 25, 2021
Gallery
Read More
2021 춘계 ITS 학회
April 25, 2021
NEWS
Read More
Progress Review by Taeho
April 2, 2021
NEWS
Read More
김인희교수 2021 기초연구사업 신진연구과제 선정
February 21, 2021
NEWS
Read More
한국ITS학회 2020년도 추계학술대회 우수논문상 수상
January 6, 2021
NEWS
Read More
공주 동학사
December 14, 2020
Gallery
Read More
Good bye Monash
December 7, 2020
Gallery
Read More
한국ITS학회 2020년도 추계학술대회
November 24, 2020
NEWS
Read More
2020 ITS 추계학회
November 20, 2020
NEWS
Read More
교통신호기 제어장치 특허출원
November 18, 2020
NEWS
Read More
2020년 추계 ITS학회
November 14, 2020
Gallery
Read More
2020 추계교통학회
November 2, 2020
NEWS
Read More
2020 추계 교통학회 우수 논문상 수상
November 2, 2020
NEWS
Read More
2020 추계 교통학회
November 2, 2020
Gallery
Read More
Special Issue
October 22, 2020
NEWS
Read More
New TUPA in Korea starts
October 16, 2020
NEWS
Read More
2021 TRB results
October 14, 2020
NEWS
Read More
Good bye Monash
September 17, 2020
NEWS
Read More
Goodbye Monash
September 17, 2020
NEWS
Read More
Dr. Inhi Kim appointed as adjunct with Monash
September 16, 2020
NEWS
Read More
Bo’s mid review
August 31, 2020
NEWS
Read More
Taeho’s (Joint with SEU) Confirmation
July 30, 2020
NEWS
Read More
Dong’s confirmation
July 29, 2020
NEWS
Read More
Lilian’s progress review
June 24, 2020
NEWS
Read More
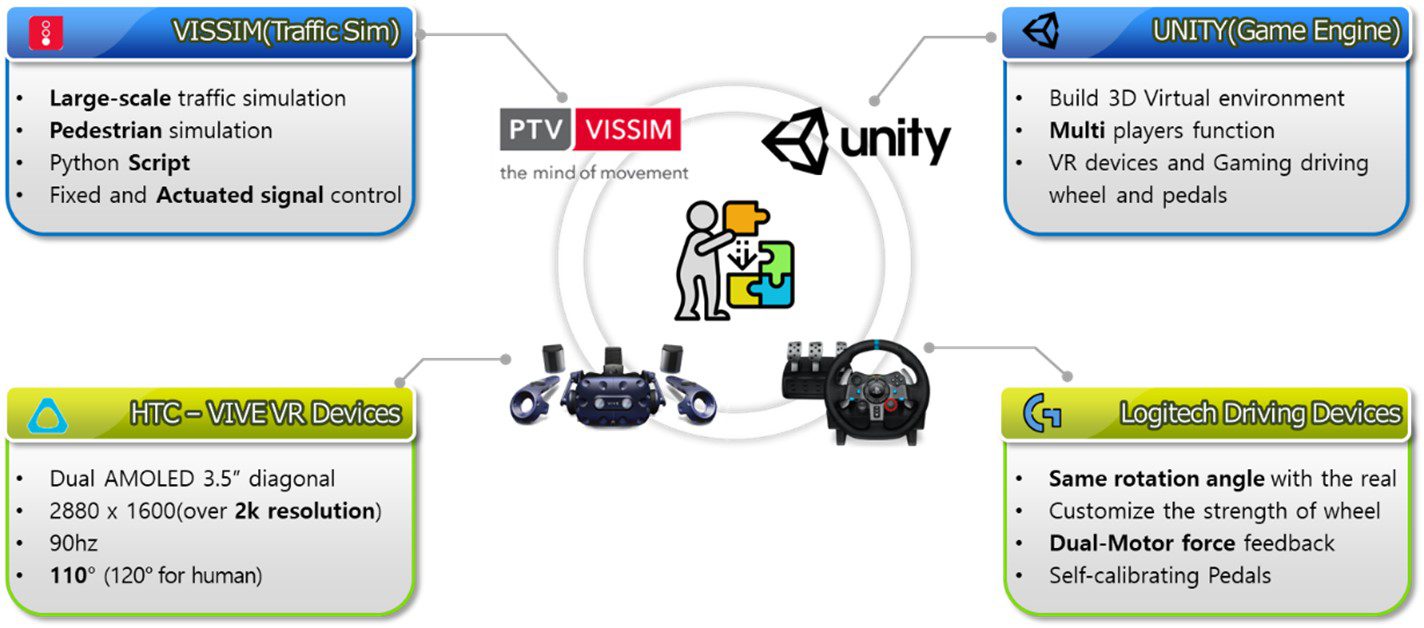
VR Driving Simulator Platform
January 28, 2020
Reasearch Project
Read More
TUPA in 99th TRB
January 14, 2020
NEWS
Read More
99th TRB conference paper acceptance
October 16, 2019
NEWS
Read More
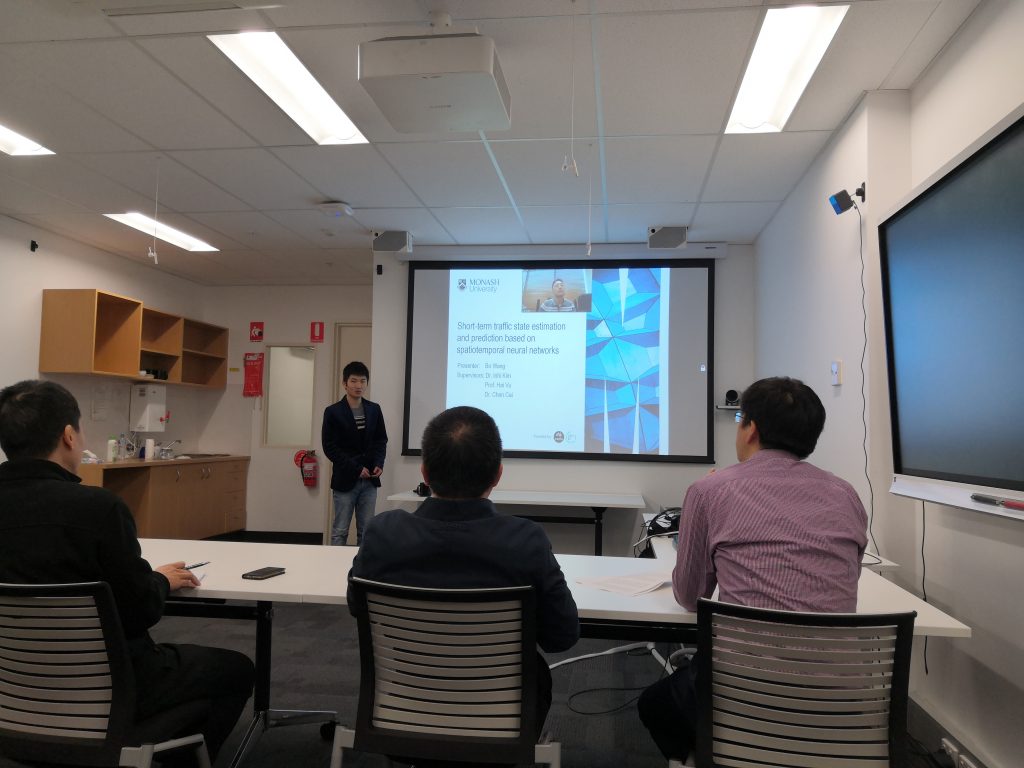
Bo Wang’s confirmation
September 6, 2019
NEWS
Read More
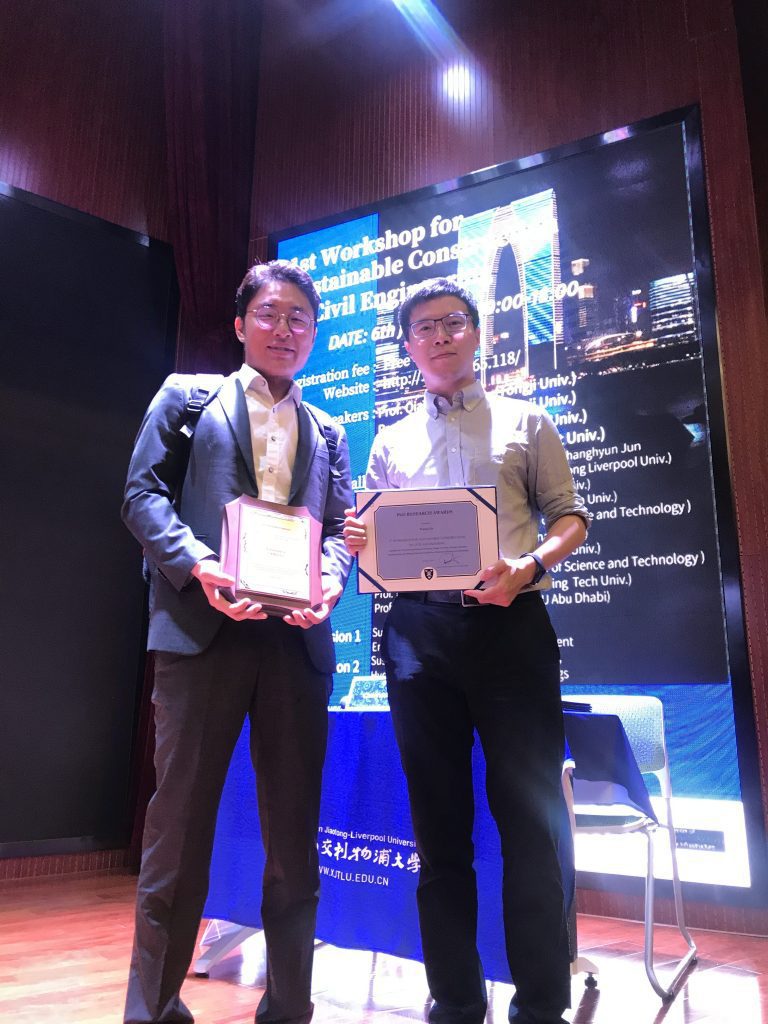
1st Joint workshop in Liverpool University, Suzhou
June 6, 2019
NEWS
Read More
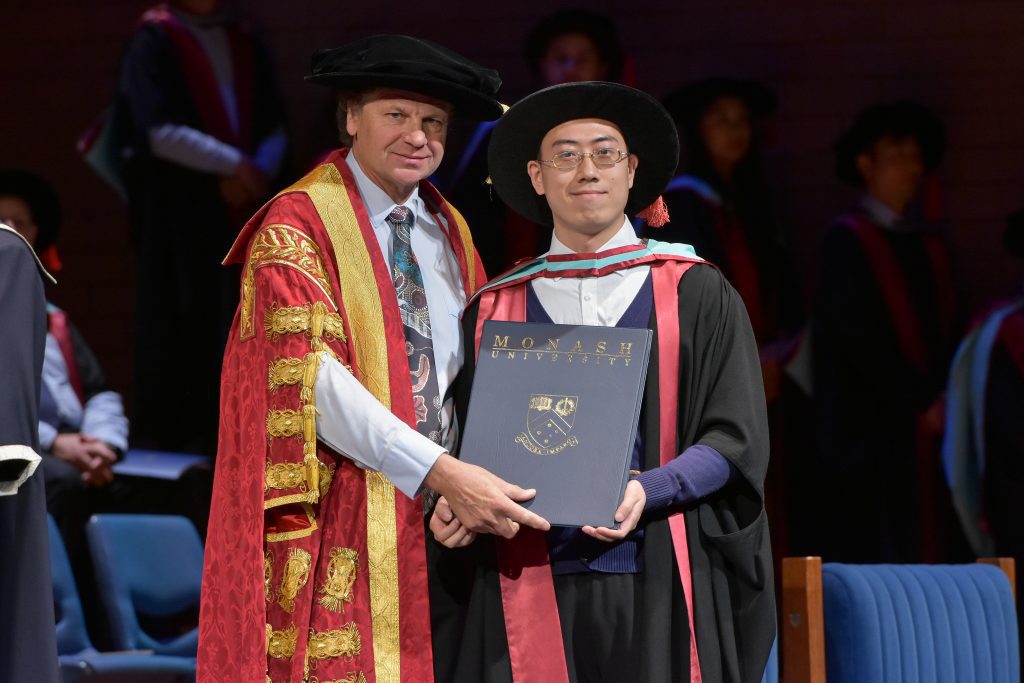
Xinyuan’s PhD graduation
May 29, 2019
NEWS
Read More
1st Workshop for Sustainable Construction in Civil engineering
April 16, 2019
NEWS
Read More
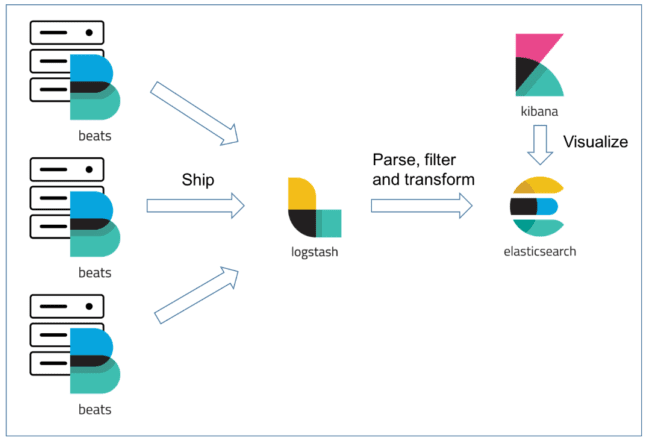
Big data Analytic and Visualization
March 28, 2019
Reasearch Project
Read More
SLAM with Autonomous vehicle using AI
March 28, 2019
Reasearch Project
Read More
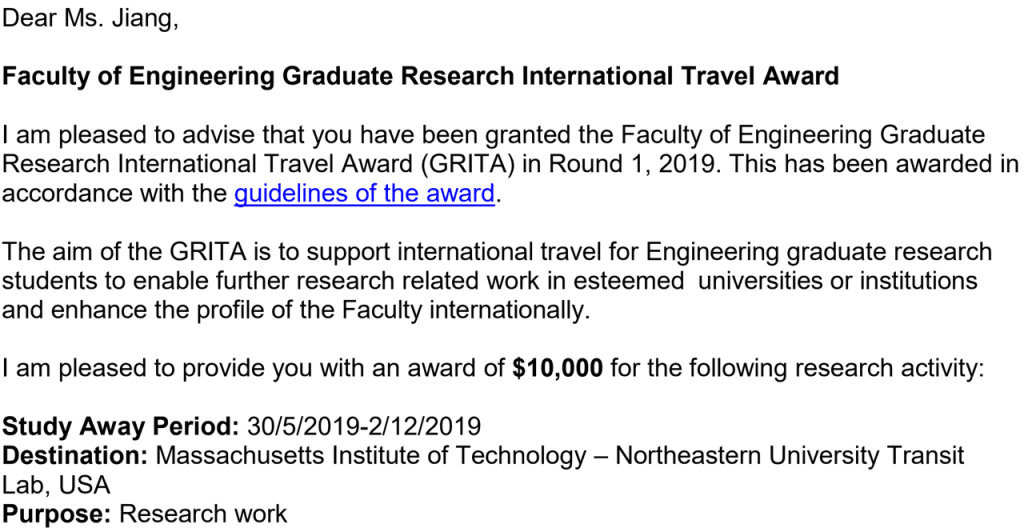
Faculty of Engineering Graduate Research International Travel Award
March 28, 2019
NEWS
Read More
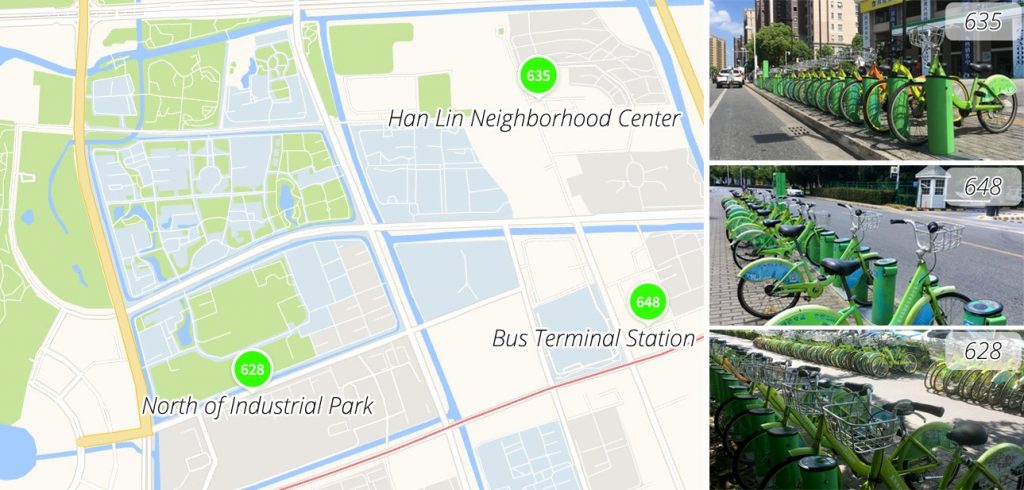
GWR in Sharing bikes
March 6, 2019
Reasearch Project
Read More
Imputation of Missing data
March 6, 2019
Reasearch Project
Read More
2019 Group BBQ
February 17, 2019
NEWS
Read More
98th TRB Conference journey
January 21, 2019
NEWS
Read More
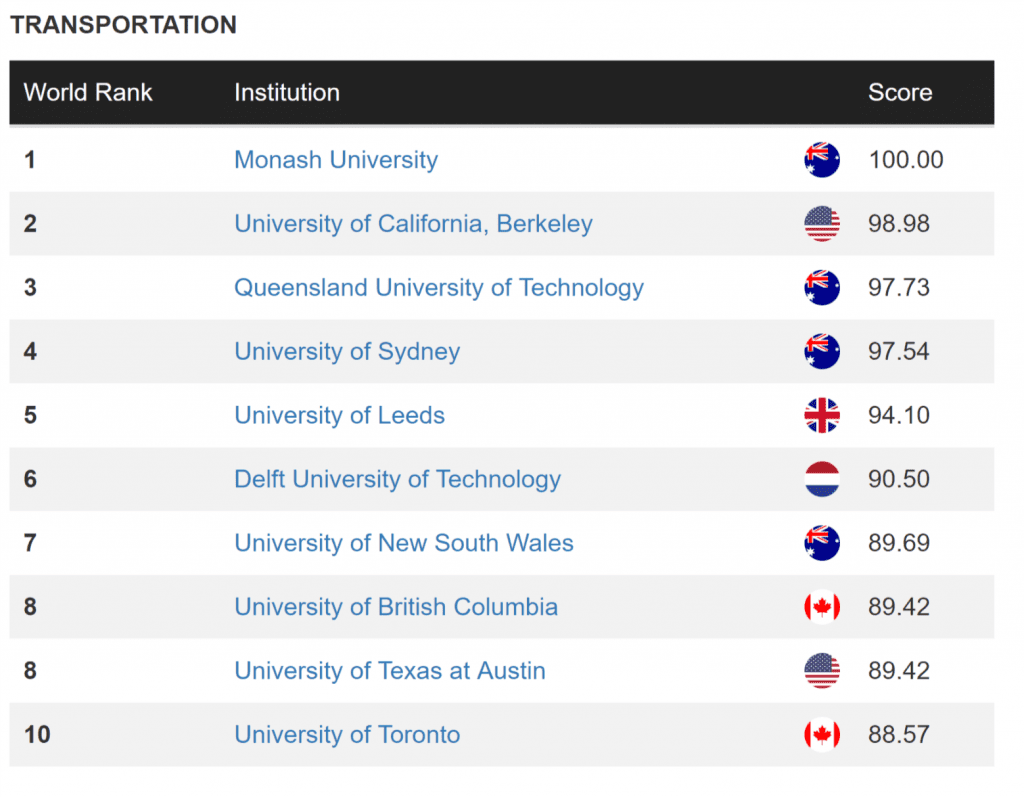
Monash Transportation ranked #1
December 21, 2018
NEWS
Read More
THE 24TH INTERNATIONAL CONFERENCE OF HONG KONG SOCIETY FOR TRANSPORTATION STUDIES
December 11, 2018
NEWS
Read More
Tianqi Gu’s mid review
November 26, 2018
NEWS
Read More
Ogden 2018 Transport Lecture
November 19, 2018
NEWS
Read More
TUPA bbq
November 17, 2018
NEWS
Read More
Wenhua’s confirmation
October 26, 2018
NEWS
Read More
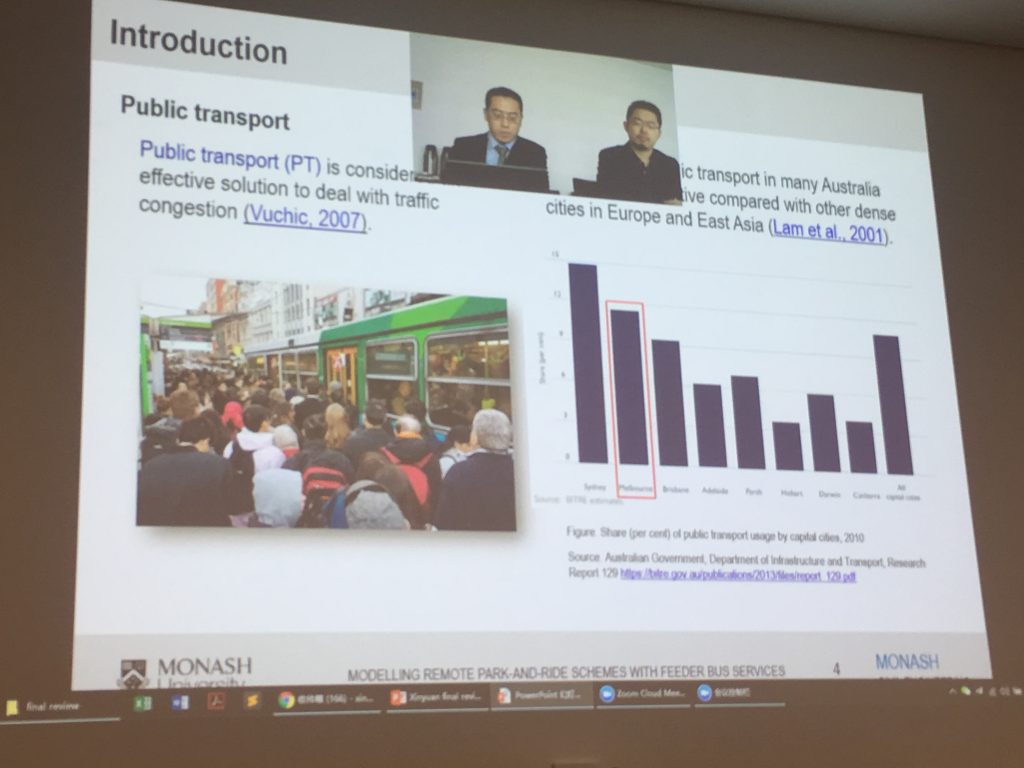
Xinyuan’s Final Review
October 11, 2018
NEWS
Read More
2019 TRB
October 6, 2018
NEWS
Read More
The 5th China-Korea Joint Seminar
September 15, 2018
NEWS
Read More
Smart parking forum in Yancheng
September 12, 2018
NEWS
Read More
Head of Department visit to Suzhou
August 14, 2018
NEWS
Read More
A workshop with ToD in Tanzania
August 5, 2018
NEWS
Read More
ISTS & IWTDCS 2018
August 3, 2018
NEWS
Read More
special lecture from Monash
July 12, 2018
NEWS
Read More
2018 Graduation
June 23, 2018
NEWS
Read More
3D Convolutional Networks for Traffic Forecasting
May 19, 2018
Reasearch Project
Read More
Special lecture from transport innovation
March 9, 2018
NEWS
Read More
Lane Change Execution Model Development
December 16, 2017
Reasearch Project
Read More
Shared Public Bike Usage
December 14, 2017
Reasearch Project
Read More
PhD Confirmation: Tianqi Gu
December 1, 2017
NEWS
Read More
New Phd program initiative
November 29, 2017
NEWS
Read More
Kai Huang Confirmation
November 22, 2017
NEWS
Read More
Welcome new phd student Wenhua Jiang
October 16, 2017
NEWS
Read More
TRB 2018
October 4, 2017
NEWS
Read More
SHORT-TERM PREDICTION FOR BIKE-SHARING SERVICE USING MACHINE LEARNING
October 3, 2017
Reasearch Project
Read More
A big congrats for Dr. Cao’s phd conferal
September 8, 2017
NEWS
Read More
The 17th COTA conference International Conference of Transportation Professionals (CICTP2017)
July 9, 2017
NEWS
Read More
Green Transportation
June 25, 2017
Reasearch Project
Read More
Monash Graduation cohort of 2014
June 25, 2017
NEWS
Read More
A special guest lecture from CCDI
June 23, 2017
NEWS
Read More
Suzhou Shared Bike Promotion
June 7, 2017
NEWS
Read More
2017 Monash public speech in Suzhou
April 28, 2017
NEWS
Read More
Director Prof Rose and Prof Vu visit suzhou
April 27, 2017
NEWS
Read More
Successful completion of Wuxi project
April 25, 2017
NEWS
Read More
Collaboration meeting with Partners in Suzhou
April 21, 2017
NEWS
Read More
Prof. S.C. Wong Visits Ajoo Univeristy, Korea
April 17, 2017
NEWS
Read More
Opening Gated Community
April 13, 2017
Reasearch Project
Read More
Mr. Tao Liu visits Monash for speech
March 26, 2017
NEWS
Read More
SIP exhibition centre visit
March 23, 2017
NEWS
Read More
International Conference of Transportation Professionals
February 13, 2017
NEWS
Read More
JITRI Research proposal granted
November 9, 2016
NEWS
Read More
ITS China Visit to Monash
October 18, 2016
NEWS
Read More
September 1, 2016
NEWS
Read More
The successful completion of Pre – Submission Seminar
August 15, 2016
NEWS
Read More
Illegal parking reinforcement app with Wechat
August 5, 2016
Reasearch Project
Read More
Appointed as an external advisor by Suzhou Gusu department of safety and security
July 20, 2016
NEWS
Read More
Guest speaker presentation
July 19, 2016
NEWS
Read More
2016 1st SEU-Monash Workshop
July 19, 2016
NEWS
Read More
ISTS&IWTDCS 2016 Conference in Jeju, Korea
July 12, 2016
NEWS
Read More
Suzhou Flooded on 2nd July 2016
July 4, 2016
NEWS
Read More
First Suzhou Based PhD, Xinyuan’s confirmation
July 4, 2016
NEWS
Read More
Public speech by Prof. Graham Currie
June 28, 2016
NEWS
Read More
Best Award of Jiangsu province of 2014
June 22, 2016
NEWS
Read More
Graham speech to Suzhou
June 22, 2016
NEWS
Read More
Masters by Research Introduced at Suzhou Campus
June 7, 2016
NEWS
Read More
Prof. Jeff and Barry visit Suzhou
June 7, 2016
NEWS
Read More
Head of Department Visit
May 19, 2016
NEWS
Read More
Proposal Granted By Wuxi Institute of Safety and Security
May 19, 2016
NEWS
Read More
Characteristics of Driving Rage and Intervention Method in China
May 18, 2016
Reasearch Project
Read More
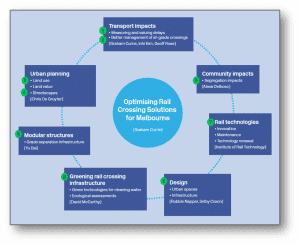
Optimizing Rail Crossing Solutions for Melbourne
May 18, 2016
Reasearch Project
Read More
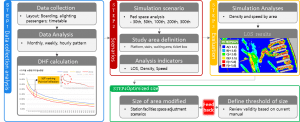
Optimization on Areas in Seoul Train Station
May 18, 2016
Reasearch Project
Read More
Introduction
Research
Team
Publication
Project
NEWS
Gallery
Contact us
© 2024
TUPA
. All rights reserved.