
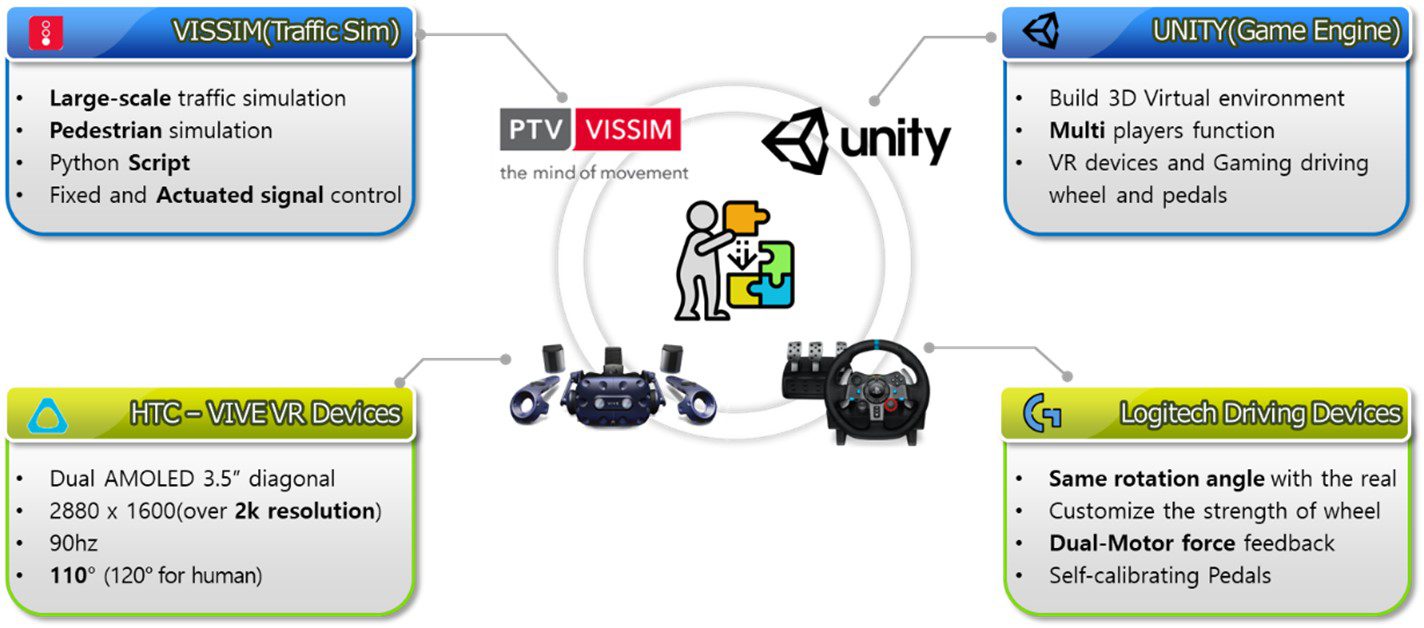
Unity-Vissim Cosimulation environment development for Human-in-the-loop test
- Existing human-in-the-loop (HIL) test systems have limitations in providing a realistic traffic environment.
- Microsimulation(VISSIM) is mainly used for traffic flow analysis because it embeds models that reflect general human driving behaviors(such as car-following and lane change).
- By integrating the two software, the cosimulation environment was built to analyze driving behaviors in realistically reproduced traffic flow situations.
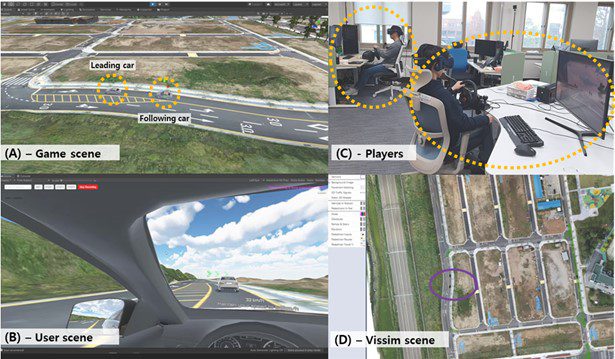
Networking based Multiagent driving simulator platform development
- Single Driving simulator has limitations in accurately reflecting human factors in collision risk situations, as vehicles in the simulation operate based on specific models.
- To overcome the limitations, a network-based multiagent driving simulator platform was developed, enabling multiple participants to engage simultaneously.
- To verify the reliability of the simulator, scenarios such as car following and unsignalized intersection crossing were selected. Real-world coordinates and speed changes were collected and statistically analyzed alongside corresponding data gathered from the simulators.
KAIST Munji campus testbed transplantation to the virtual world
- To conduct a test-based study, the KAIST Munji campus was scanned using a drone.
- Point cloud data was collected and used for 3D modeling.

- Performed autonomous vehicle data replay in the metaverse environment based on the trajectory provided in Prof. Dongseok Kum’s laboratory (VDC lab).

- Pedestrian model control module was embedded into the developed multiagent simulator platform to extend vehicle-human interactions cases.

Comments are closed.