Our paper won the best article award in the journal Multimodal Transportation 2024. This content establishes an income matrix for drivers in varied scenarios and employs evolutionary game theory (EGT) to dissect the dynamic operating strategies of taxi and online car-hailing drivers.
https://www.sciencedirect.com/science/article/pii/S2772586324000108

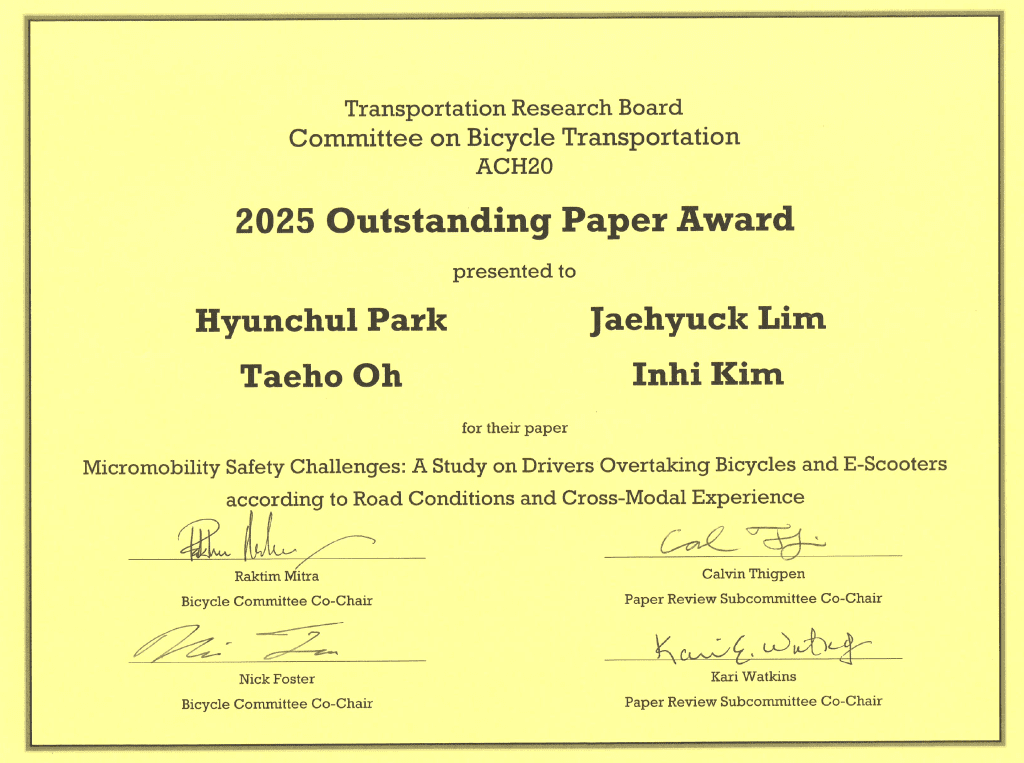
I am truly honored that TUPA was selected for the Outstanding Paper award by the committee on bicycle transportation at the 104th Transportation Research Board Annual Meeting. This paper achieved the highest ranking with a perfect score of 10 out of 10. I am extremely proud of my students for their outstanding achievements.
The paper titled “Micromobility Safety Challenges: A Study on Drivers Overtaking Bicycles and E-Scooters According to Road Conditions and Cross-Modal Experience,” co-authored by Hyuncheol Park, Jaehyuk Lim, and Taeho Oh presents important research on the challenges facing micro-mobility in the face of increasing traffic accidents. This is a timely and significant study, especially as micro-mobility systems face growing difficulties.
Hyuncheol Park is a master’s student and has already confirmed his plans to pursue a Ph.D., and I am confident he will continue to produce exceptional research over the next four years.
I want to extend my deepest gratitude to the committee members who selected this paper for the Outstanding Paper award and particularly to the Committee Chair, Mr. Calvin Thigpen, for his invaluable support and guidance.




© 2025 TUPA. All rights reserved.