At the 2023 Seoul Mobility Show(https://lnkd.in/gVxGSU9S) , we exhibited the multi-agent metaverse platform on behalf of KAIST Cho Chun Sik Mobility Graduate School. The KAIST campus was made into a virtual environment for the children who visited our booth and the experience of exploring the campus by walking, running, and driving in the virtual environment.
The self-driving car developed by Prof. Dongsuk Kum(http://vdclab.kaist.ac.kr/) in our department used the campus as a test bed and trained as a safer vehicle. This is physically time-consuming and costly. Thousands of scenarios can be tested without limit by building a virtual environment, and situations that are very difficult in real life can be created in the virtual environment. These abnormal driving behaviors become very important input data for autonomous vehicles.
Author: INHI KIM (page 10 of 22)

Dr. Inhi Kim was appointed as an associate professor at KASIT on 1st Jan 2023. TUPA keeps leveraging research capacity and bringing great social benefit through education and research.


A big congrats on acquisition of drone licenses by TUPA members. Hyunsup and Jaehyuck become pilots of an ultra light vehicle!!
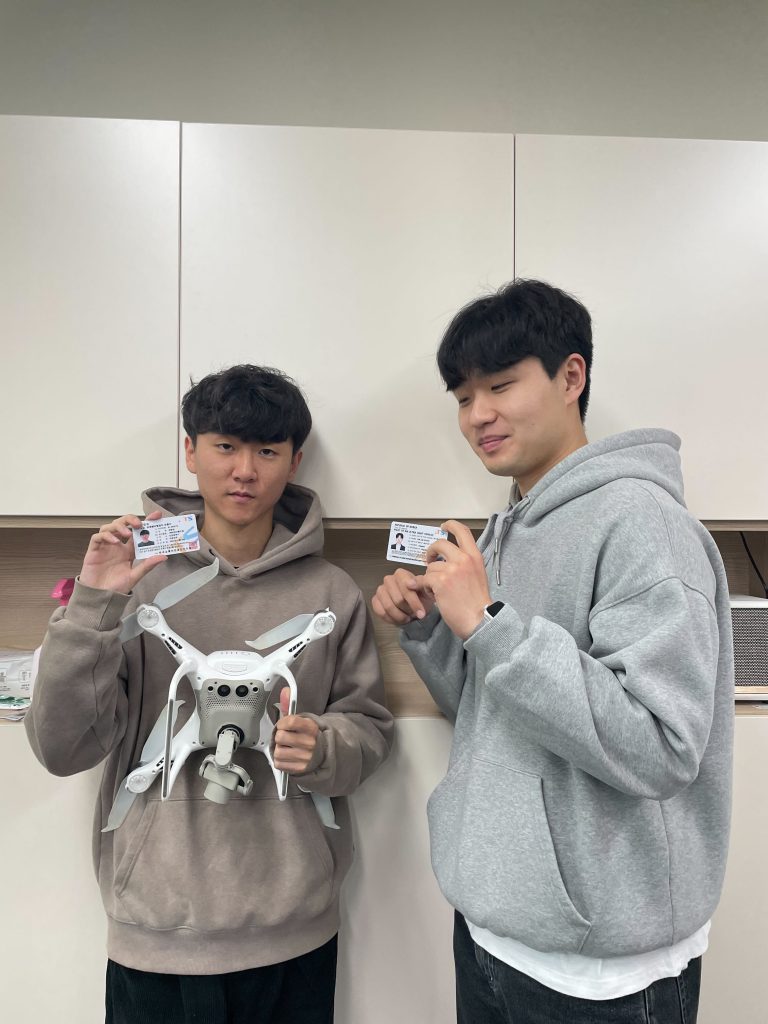


A big congrats!!!
TUPA has 4 papers accepted by TRB 2023. This is a great achievement that our masters students finally make good research impacts. I hope TUPA doubles the research outcome next year!!!
- TRBAM-23-02518, “Effects of Driver’s Braking Response by the Real-Time Pedestrian Scale Warning System” by Hyunchul Park, Taeho Oh, Inhi Kim
- TRBAM-23-03949, “Robust Overtaking Behavior with Human Interaction in Multi-agent Driving Simulator Supported by Machine Learning” by Taeho Oh, Zhibin Li, Inhi Kim
- TRBAM-23-00384, “Designing patrol ship routes based on multi data sources for marine environment” by Fatemeh Nourmohammadi, Zahra Nourmohammadi, Jinwoo Lee, Inhi Kim
- TRBAM-23-02308, “Large-scale Network Imputation and Prediction of Traffic Volume based on Multi-source Data Collection System” by Donghyun Kwon, Changhee Lee, Inhi Kim













40th Anniversary International Conference of the Korean Society of Transportation & 10th International Public Transportation Forum to commemorate the world-class “K-Transport”











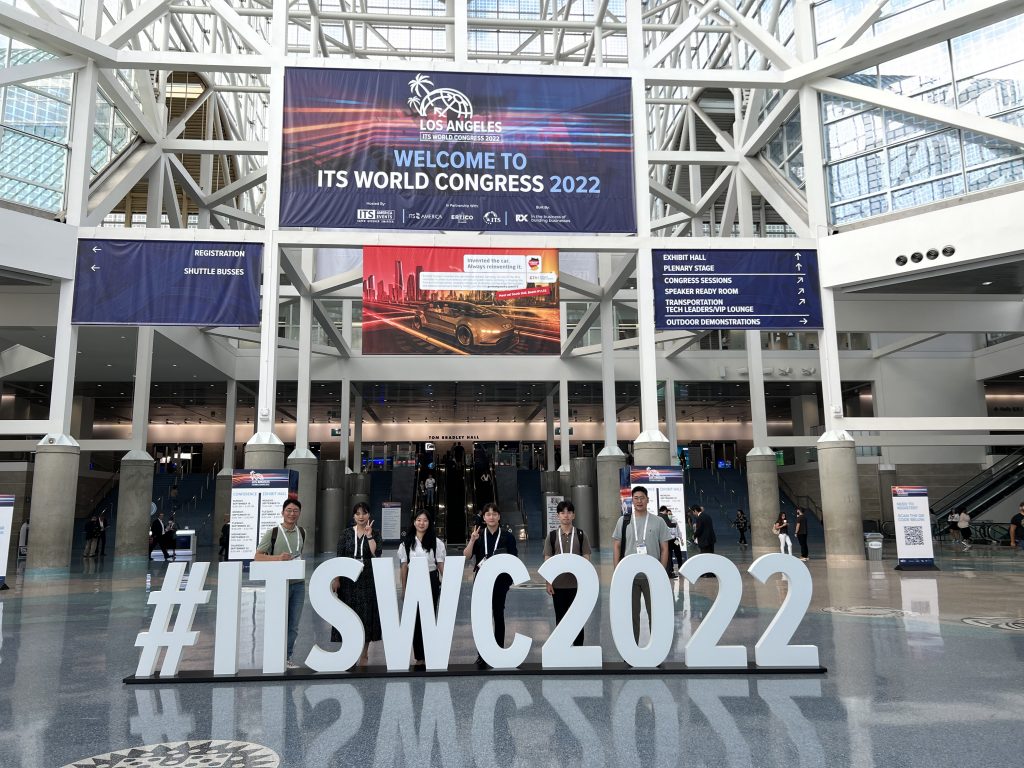
TUPA in LA!!
Webpage
- Overtaking Maneuvers using Multi-Agent Systems on a Two-Lane Two-Way Road by Taeho Oh
- An impact of vehicles in the platooning on the road network by Yegi Yoo
- Validation of Spatial Orientation Skill using Virtual Reality Treadmill by Hyunchul Park
- Large Scale Multi-source Traffic Flow Forecasting Based on Attention Based Spatio-Temporal Graph Convolutional Networks – LSTM by Donghyung Kwon



A big congrats!!!
Donghyun Kwon and Bo Wang(Swinburn University in Melbourne) won the 1st prize from Kakao mobility data competition held in the 40th Korean Transportation Conference in Seoul.


Media appearances below
http://www.ebaekje.co.kr/news/articleView.html?idxno=132187
http://www.ggilbo.com/news/articleView.html?idxno=937818
https://www.ccdailynews.com/news/articleView.html?idxno=2158562
https://www.newscj.com/article/20221006580805
http://m.joongdo.co.kr/view.php?lcode=&series=&key=20221005010000941
http://www.dynews.co.kr/news/articleView.html?idxno=675538
https://www.dtnews24.com/news/articleView.html?idxno=732951
Congratulations.
Fatemeh won the best paper presentation at the 2022 Korean ITS Society Spring Conference with the research topic “Deajeon traffic accident clustering based on machine learning and deep learning”.