
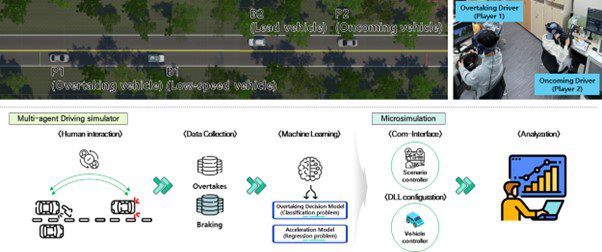
Interactive driving behavior in overtaking situation
- Existing studies on overtaking behavior have only examined it from the perspective of the overtaking vehicle, with limited consideration for the risk level of the vehicle approaching from the opposite side.
- The multiagent simulator helped collect a realistic overtaking driving dataset without compromising safety. The collected data was preprocessed using SMOTE_Tomek-based imbalanced data techniques to build a high-quality dataset and model human decision-making based on machine learning
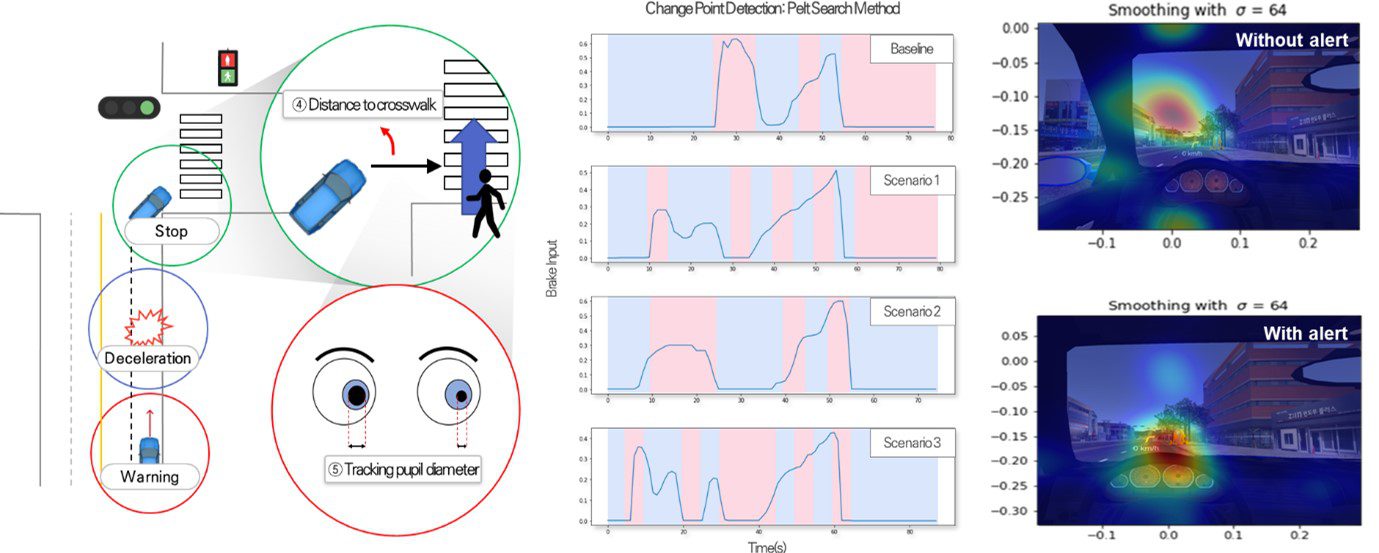
Human Recognition based on ITS technology
- Changes in drivers’ cognitive responses and driving behavior were observed when warning right-turning vehicles to improve pedestrian safety at intersections.
- By considering human factors such as the driver’s pupil size, viewing position, braking, and acceleration, the points where changes in driving behavior were detected and differences in behavior based on the warning method were analyzed.
Pedestrian behavior
- A pedestrian treadmill simulator is connected to the Metaverse simulator platform to calculate parameters for pedestrian height and stride length, ensuring reliable data collection for pedestrians.

Comments are closed.