The lane change behaviour is not only impacted by the blockage but also the surrounding traffic. The combination of these two impacts determines the subject vehicle lane change execution behaviour: i.e. to either Continue lane change execution or Not Continue lane change execution.
We developed the lane change execution model based on the model framework, followed by the lane change execution model (LCEM) calibration. The lane change execution behaviour of PC is different from that of HV, it is worth exploring the LCEM for PC and HV separately. Based on the results of LCEM and analysis of the lane change execution characteristics of PC and HV, the LCEM for PC and HV are established and parameters are estimated accordingly.
Lane Change Execution Model Evaluation with Micro-Simulation Outcomes
Microscopic traffic simulation is an efficient and widely-used tool for analyzing the performance of roadways on traffic, safety and the transportation system (Young, Sobhani et al. 2014). The core of a simulation model is a set of mathematical algorithms that evaluate the motion of each vehicle on a second-by-second basis as it interacts with the road network, the traffic control system and the surrounding traffic environment. A lane-changing model is incorporated as one of the basic driver behaviour interaction in the microscopic traffic simulations based on different algorithms. Two major simulation models (VISSIM (2012)and AIMSUN (2012)) outputs of lane change processes are analyzed in this section.
- VISSIM
To assure a model reproduces real-world traffic conditions reasonably well, the simulation parameters have been calibrated using the data collected by the same camera. Headway is used as an indicator to adjust the parameter values. When the Mann Whitney U test shows the distributions of headway from simulation and observation are comparable, the calibration process is completed. It is noted that after the calibration completed, VISSIM still provides the fixed value for lane change duration due to lack of lane change execution models integrated.
The output from Vissim shows that the duration of lane change is a fixed value. For the passenger cars (PC), the lane change duration is 2.2s; and for the heavy vehicles (HV), the duration is 2.4s. However, from the observed data collected in this study the lane change durations vary from 1s to 6.8s for both vehicle types. The distributions of lane change duration from the observed data for PC and HV are shown.
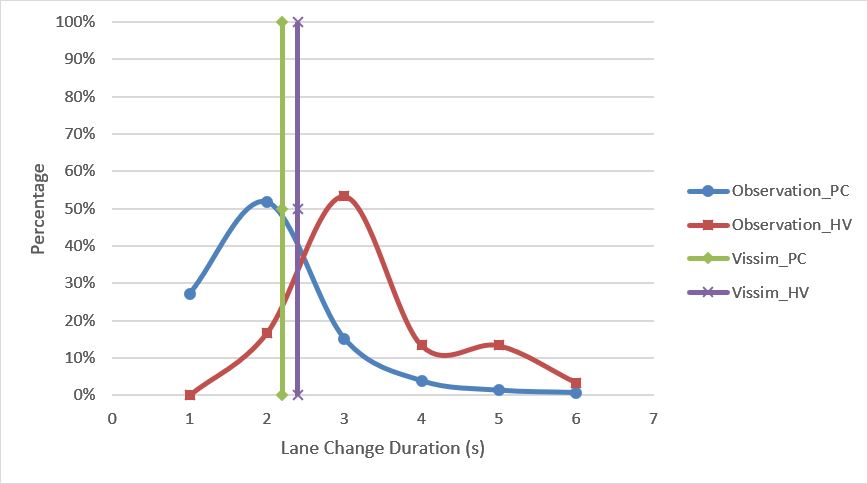
Distributions of Lane Change Duration of PC and HV from Observation
In terms of the lane change trajectory analysis, Vissim provides the lane change start and end locations which indicate the lane change trajectory in the longitudinal direction. For passenger cars, the lane change length from Vissim ranges from 1.6m to 32.4m, while the observation of the lane change length ranges from 19.6m to 76.3m. Figure 8-2 shows the distributions of the lane change length in longitudinal direction for passenger cars between Vissim output and observation. For heavy vehicles, the lane change length from Vissim ranges from 4.1m to 28.7m, while the observation of the lane change length ranges from 40.3m to 96.7m. Figure 8-3 shows the distributions of the lane change length in longitudinal direction for heavy vehicles between Vissim output and observation. The result implies that the lane change trajectory Vissim generates is much different from the real-life lane change trajectory for both passenger cars and heavy vehicles.
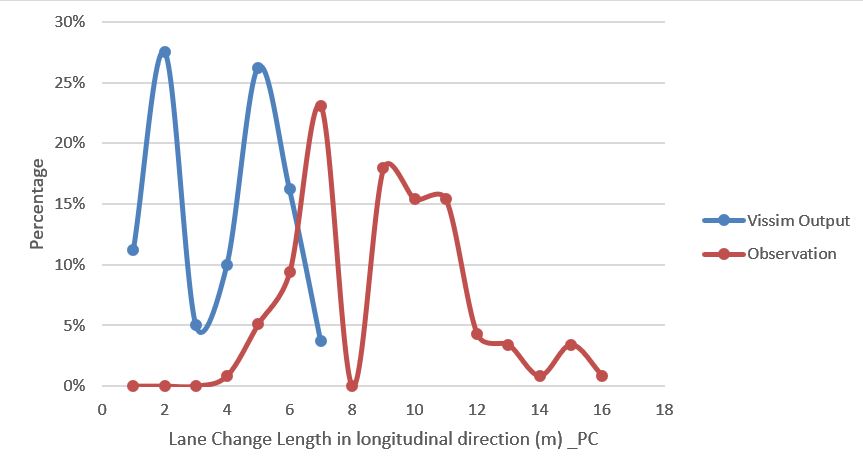
Distributions of Lane Change Length in Longitudinal Direction of PC
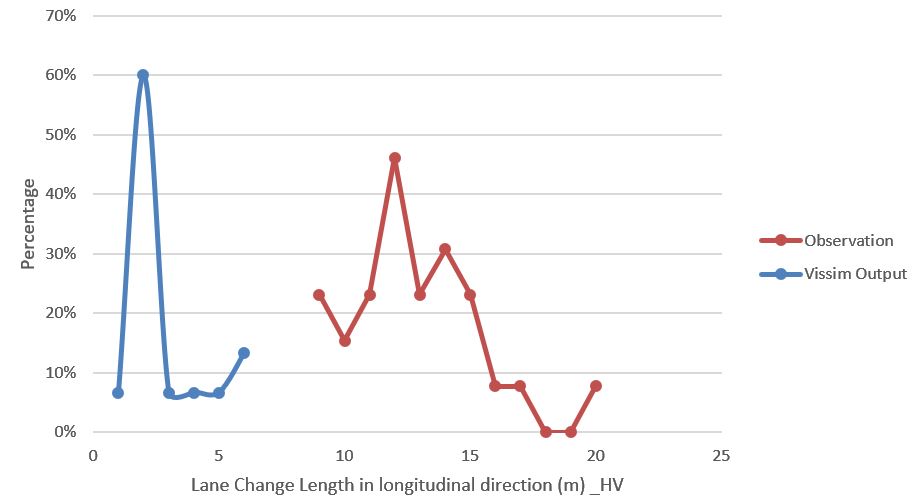
Distributions of Lane Change Length in Longitudinal Direction of HV
- AIMSUN
Figure shows the distributions of travel time during the blocked section for the passenger cars. The travel time of passenger car from AIMSUN ranges from 2.6s to 16.8s, while the travel time of passenger car from observation ranges from 7s to 21.2s. It can be seen that the travel time is generally smaller than the observed travel time. Especially the minimal travel time from AIMSUN output is 2.6s which is 4.4s smaller than the minimal travel time of observations. It is not realistic for a PC to complete 140m in 2.6s.
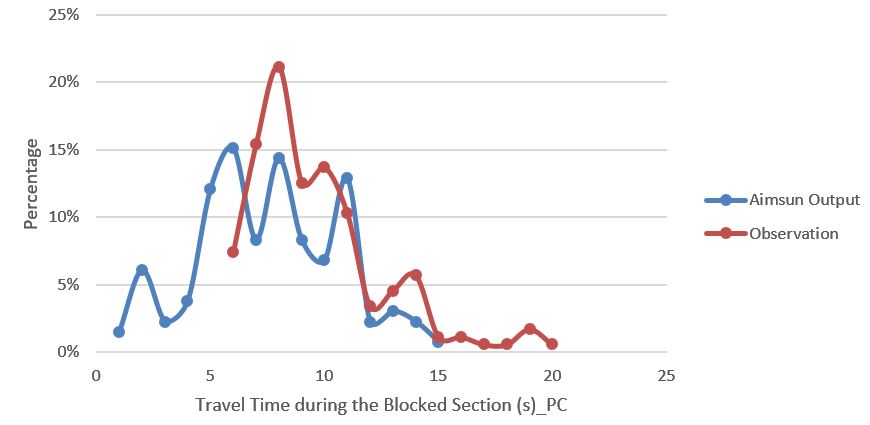 Distributions of Travel Time of PC during the Blocked Section
Distributions of Travel Time of PC during the Blocked Section
Figure shows the distributions of travel time during the blocked section for heavy vehicles. The travel time of heavy vehicle extracted from AIMSUN ranges from 13.4s to 16s, while the travel time of passenger car from observation ranges from 9s to 21.6s. It can be seen the travel time from observations for HV has a larger range while the travel time from AIMSUN output is clustered in a certain range, which means it does not reflect the observation well.
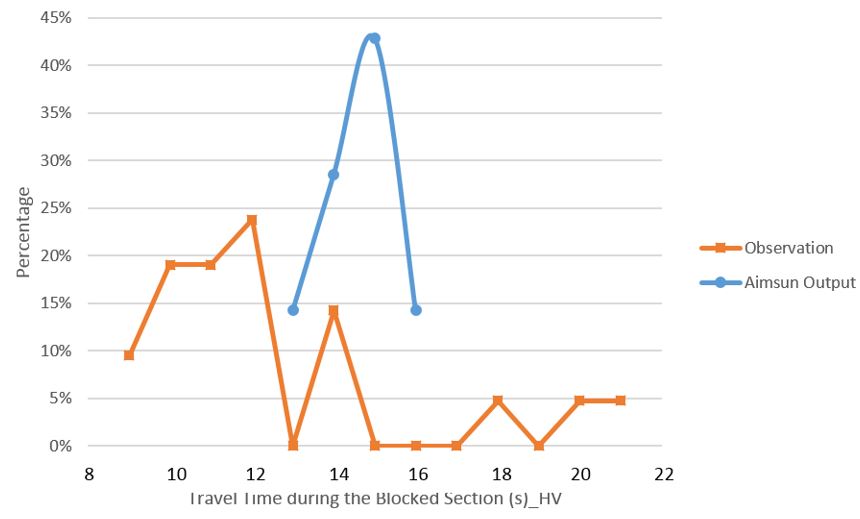
Distributions of Travel Time of HV during the Blocked Section
The results imply that the AIMSUN output differs from the observed data on lane change execution collected for this study, especially for the heavy vehicles.
Evaluation of Lane Change Execution Model
The lane change execution model is applied on the existing simulation outputs. This study assesses the results from lane change execution model and the real-life data to see the improvement of the model to the simulation output.
To apply the LCEM on the simulation output, the traffic output data need to be extracted from Vissim, identifying the subject vehicles and direct surrounding vehicles and recording the each vehicle traffic information in every 0.1s. A Matlab program is developed to apply the LCEM using the basic vehicle information from Vissim to predict the lane change behaviour. The result of lane change execution prediction (Continue Lane Change or Not Continue Lane Change) is thus used to identify the lane change execution durations.
The original output from Vissim shows that the duration of lane change is a fixed value, which is 2.2s for passenger cars. The original simulation output is apparently not fitting the distribution of the lane change duration observation. While applying the lane change execution model on Vissim, the lane change duration distribution is fitting the duration distribution of observations much better.
Figure shows the comparison of passenger car lane change duration distribution between the outputs applied the execution model, the real-life observed data and the outputs from simulations. The lane change duration of PC in Vissim is 2.2s and 0s in Aimsun. The comparison indicates that the lane change execution model is able to improve the simulation outputs to fit the real life lane change behaviour better for the passenger cars.
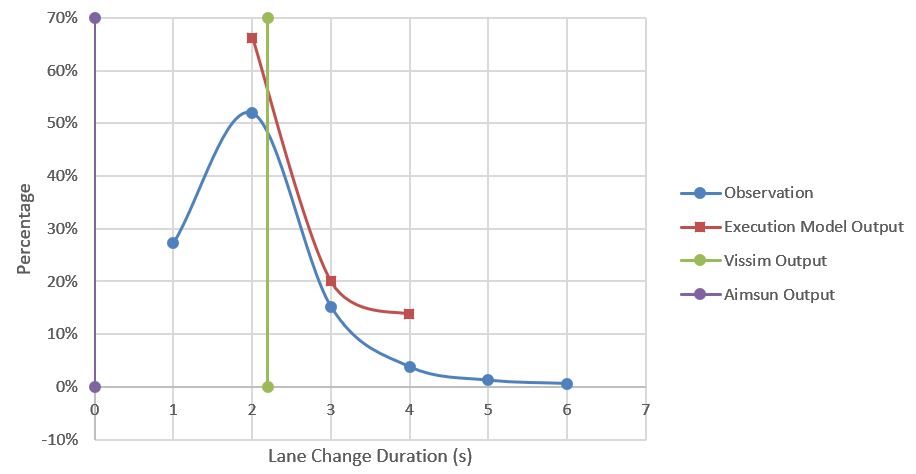
Comparison of Lane Change Duration Outputs for PC
The limitation of this work is all durations of the outputs are larger than 2.2s which is the fixed value provided from Vissim. It can be seen that the range of 2~3s has very high portion in the model output compared to other duration ranges. The reason could be that it also includes the lane change durations which are smaller than 2.2s. This could be a good part of the future work to improve the current simulations.
Figure shows the comparison of heavy vehicle lane change duration distribution between the outputs applied the execution model, the real-life observed data and the outputs from simulations. The lane change duration of HV in Vissim is 2.4s and 0s in Aimsun. The distribution of HV lane change duration is not as good as the distribution of PC lane change duration which fits the observed data better. However the trend of lane change duration is close to the observations than the outputs from the current traffic simulations. The result also indicates that employing the lane change execution model for HV would obtain the outputs closer to the real life lane change behaviour.
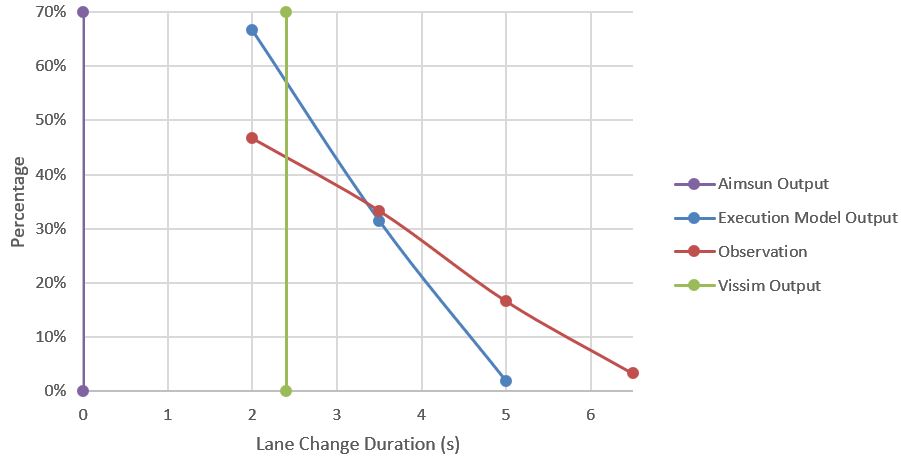
Comparison of Lane Change Duration Outputs for HV
Similar to the limitation for PC, the high portion of 2.5~3s of HV lane change duration could be caused by the fixed value of 2.4s which are extracted from Vissim. Moreover, the size of observed data samples also could be a limitation of this work. The further work will need to collect more data for HV in different location.
Comments are closed.