40th Anniversary International Conference of the Korean Society of Transportation & 10th International Public Transportation Forum to commemorate the world-class “K-Transport”











40th Anniversary International Conference of the Korean Society of Transportation & 10th International Public Transportation Forum to commemorate the world-class “K-Transport”
TUPA in LA!!



A big congrats!!!
Donghyun Kwon and Bo Wang(Swinburn University in Melbourne) won the 1st prize from Kakao mobility data competition held in the 40th Korean Transportation Conference in Seoul.


Media appearances below
http://www.ebaekje.co.kr/news/articleView.html?idxno=132187
http://www.ggilbo.com/news/articleView.html?idxno=937818
https://www.ccdailynews.com/news/articleView.html?idxno=2158562
https://www.newscj.com/article/20221006580805
http://m.joongdo.co.kr/view.php?lcode=&series=&key=20221005010000941
http://www.dynews.co.kr/news/articleView.html?idxno=675538
https://www.dtnews24.com/news/articleView.html?idxno=732951
Congratulations.
Fatemeh won the best paper presentation at the 2022 Korean ITS Society Spring Conference with the research topic “Deajeon traffic accident clustering based on machine learning and deep learning”.
축하합니다.
한국과학기술단체 총연합회가 제정한 ‘제 32회 과학기술우수논문상’ 으로 정재은 석사과정 학생이 선정되었습니다.
논문제목은 “GPS Trajectory data 기반 통행비용함수 보정방안”으로 정재은, 오태호, 김인희가 저자로 참여하였습니다.
시상편수는 총 248편이다. ▲이학 34편 ▲공학 88편 ▲농수산학 41편 ▲보건 56편 ▲종합 29편입니다.
정재은 학생은 이중 종합편에서 수상하였습니다. 축하합니다.

Congratulations.
Our 4th year students Jaehyeok Lim, Songmi Baek, and Dohyeon Kim won the grand prize in the special session for undergraduate students at the 2022 Korean ITS Society Spring Conference with the research topic “Traffic Prediction of VDS Detector Through Machine Learning”.


Tupa 가 2022년 4월 21일~22일 경주화백컨밴션센터에서 개최된 대한교통학회 제 86회 학술발표회에서 우수논문으로 3편이 선정되었습니다. 우리 학생들 쵝오!!!
What a big achievement!!!!
Jaeeun wins the best paper of the year 2021 from the Journal of Korean Society of Transportation. The paper title is “VDF calibration based on GPS trajectory data”.

축하합니다. TUPA가 참여한 “긴급선박 운영지원 서비스개발” 과제가 우수평가를 받았습니다. 한국해양교통안전공단 컨소시엄으로서 명지대학교 박호철 교수와 함께한 이번 프로젝트에 좋은 평가를 받았습니다. 책임인 신대섭 박사님, 수고 많이 하셨습니다.
수고많이 한 연구원들 특히, Fatemeh 와 권동현 학생 고생많이 했습니다.
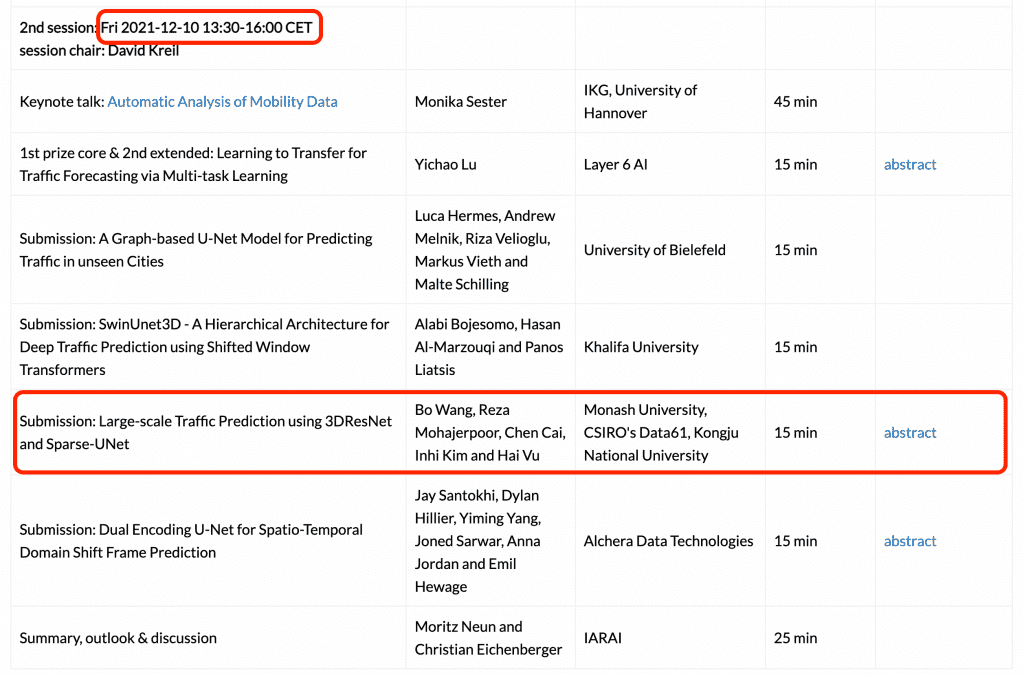
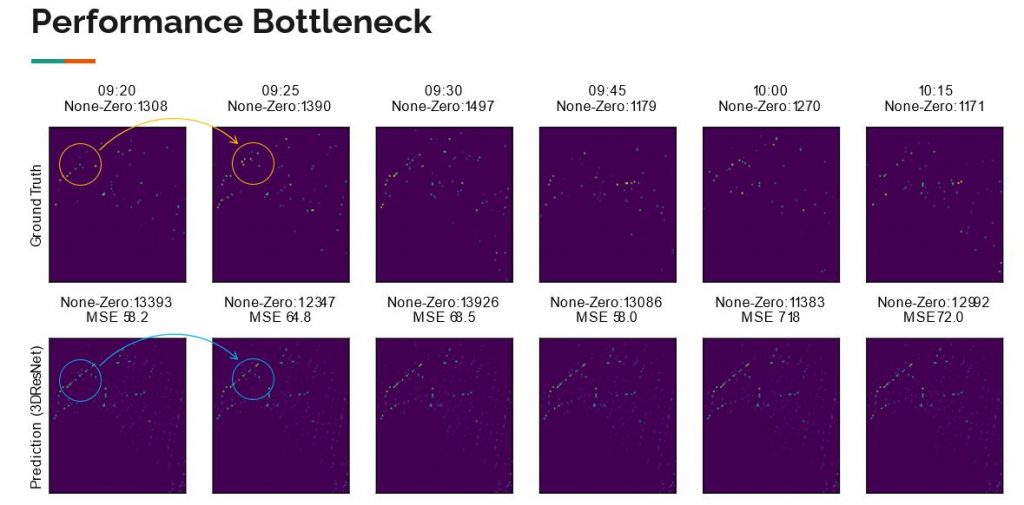
Bo makes a presentation of his current research in NeurIPS 2021!!
The title is “Large-scale Traffic Prediction using 3DResNet and Sparse-UNet”
Further information for the program please visit the website.
https://www.iarai.ac.at/traffic4cast/
© 2026 TUPA. All rights reserved.